簡介:Lexium 05 功能概覽,Lexium 05 伺服驅動器提供相當多的功能,使它能夠在非常廣泛的工業場合中應用。……
ABB機器人M2000 伺服驅動器提供相當多的功能,使它能夠在非常廣泛的工業場合中應用。
這兩個功能家族是:
傳統調試功能,如:
原點回歸,
在操作人員控制下移動(手動模式),
伺服驅動器-伺服電機組合的自動調諧。
操作模式:
位置控制:
- 點到點模式,
- 電子齒輪模式。
速度控制:
- 帶位置控制的速度控制,
- 直接速度控制。
轉矩控制:
- 電流控制。
可以有兩種控制模式:
本地控制模式
網絡控制模式
本地控制模式下,伺服驅動器參數可以通過集成顯示終端,遠程終端或PowerSuite軟件定義。運動由模擬信號(± 10 V)或RS422形式信號(脈沖/方向或A/B編碼器信號)決定。 這種模式下,行程開關和原點傳感器輸入不由伺服驅動器管理。
原點回歸
絕對坐標下,從一個點移動到另一個點之前,必須執行原點回歸操作程序。 原點回歸程序在于將軸位置值與已知的機械位置相關聯。此位置成為以后軸運動的參考位置。
原點回歸可以通過直接把軸的實際位置寫入寄存器,或通過一系列到原點傳感器的運動執行。
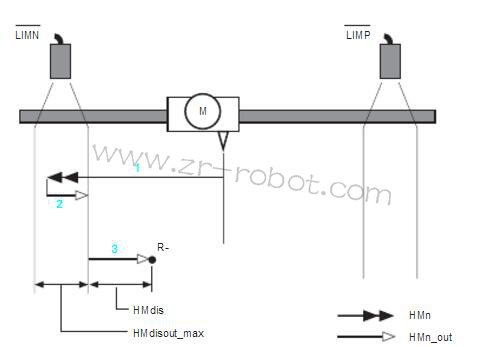
運動到位置傳感器的原點回歸
控制器支持4種形式的運動到位置傳感器的原點回歸程序:
原點回歸到負限位開關,“LIMN”。
原點回歸到正限位開關,“LIMP”。
原點回歸到參考開關“REF” ,第一次沿負方向移動。
原點回歸到參考開關“REF”,第一次沿正方向移動。
原點回歸程序的執行可以考慮或不考慮編碼器索引脈沖。
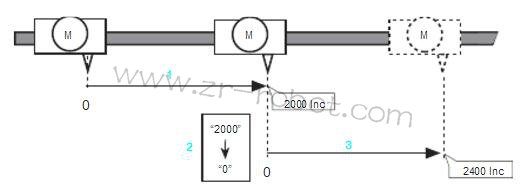
強制原點回歸
強制原點回歸即直接設定當前電機位置為新參考點,所有以后的定位數據參考此點
手動模式
這種模式下軸可以在操作者的控制下直接運動。
電機來回運動一個路徑單元或以恒定速度連續運動。有兩種運動速度可選(慢或快)。多種參數允許完全通過手動模式指定。
設定點值
參數可以通過通訊網絡, PowerSuite軟件或伺服驅動器集成的顯示終端傳送。
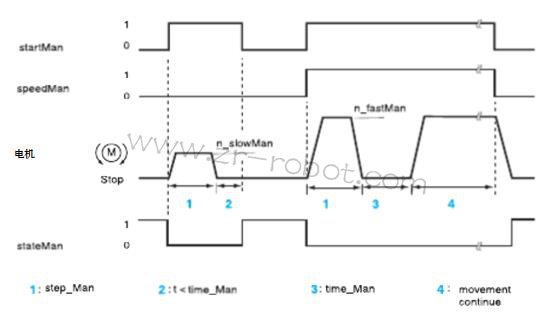
采用手動模式移動軸。
作為控制位“startMan”上升的結果,會以低速或高速運動到一個定義好的距離(1),速度取決于第二控制位。
如果“startMan”控制位保持激活超過一個定義時間“timeMan” - 事例 3 -,運動重新開始并持續進行 (4), 在操作者的監視下,直到“startMan”位返回非激活狀態。一個“stateMan”位反映當前電機狀態-準備移動/旋轉中-當伺服驅動器在手動模式下控制時。
文章來源,
工業機器人維修官網:www.czyjl.com


 首頁 > ABB驅動模塊維修 >
首頁 > ABB驅動模塊維修 >